 189-9434-7807
189-9434-7807
首页 产品中心

X4-10
产品特点:体积小巧、轻量化、高精度、大扭矩、低噪音
产品介绍:机器人关节模组为一体化集成设计,整合电机、减速器与控制系统。具备体积小巧、轻量化、高精度、大扭矩、低噪音等优势,安装便捷、稳定性强,广泛适配工业机械臂、人形及协作机器人多场景使用。

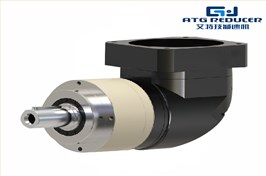
PGER42
产品特点: 高精度,高扭矩,高刚性,高效率,高稳定性,低噪音,低背隙。
产品介绍: 可搭配步进马达或伺服马达使用,降低转速、高转矩化、增加马达转子惯性,提高刚性、缩短启动与停止定位时间,马达功率小型化 ,同时提高惯性负载的稳定性与降低振动。单级可达3弧分内,双级可达5弧分内。
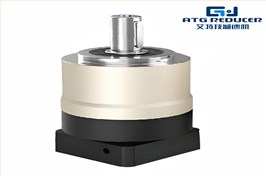
PCHR42
产品特点: 高精度,高扭矩,高刚性,高效率,高稳定性,低噪音,低背隙。
产品介绍: 可搭配步进马达或伺服马达使用,降低转速、高转矩化、增加马达转子惯性,提高刚性、缩短启动与停止定位时间,马达功率小型化 ,同时提高惯性负载的稳定性与降低振动。单级可达3弧分内,双级可达5弧分内。
PCH42
产品特点: 高精度,高扭矩,高刚性,高效率,高稳定性,低噪音,低背隙。
产品介绍: 可搭配步进马达或伺服马达使用,降低转速、高转矩化、增加马达转子惯性,提高刚性、缩短启动与停止定位时间,马达功率小型化 ,同时提高惯性负载的稳定性与降低振动。单级可达3弧分内,双级可达5弧分内。

QDY-HS1
产品特点:小型轻量 传动精度高 传动速比大 结构简单紧凑、安装方便 承载能力高 可向密闭空间传递运动 传动效率高、运动平稳。 产品介绍:谐波齿轮减速器是一种由固定的内齿刚轮、柔轮、和使柔轮发生径向变形的波发生器组成,它是利用柔性齿轮产生可控制的弹性变形波,引起刚轮与柔轮的齿间相对错齿来传递动力和运动。

RV 06E
产品特点:结构紧凑、体积小、扭矩大。高刚性、高精度、低背隙
产品介绍:是采用了摆线针轮的减速结构的高精密控制用减速机,抗冲击强、寿命长、运行平稳。适配工业机器人、自动化设备等重载精密场景

X4-36
产品特点:体积小巧、轻量化、高精度、大扭矩、低噪音
产品介绍:机器人关节模组为一体化集成设计,整合电机、减速器与控制系统。具备体积小巧、轻量化、高精度、大扭矩、低噪音等优势,安装便捷、稳定性强,广泛适配工业机械臂、人形及协作机器人多场景使用。
RV 20E
产品特点:结构紧凑、体积小、扭矩大。高刚性、高精度、低背隙
产品介绍:是采用了摆线针轮的减速结构的高精密控制用减速机,抗冲击强、寿命长、运行平稳。适配工业机器人、自动化设备等重载精密场景
PGER60
产品特点: 高精度,高扭矩,高刚性,高效率,高稳定性,低噪音,低背隙。
产品介绍: 可搭配步进马达或伺服马达使用,降低转速、高转矩化、增加马达转子惯性,提高刚性、缩短启动与停止定位时间,马达功率小型化 ,同时提高惯性负载的稳定性与降低振动。单级可达3弧分内,双级可达5弧分内。
PCHR60
产品特点: 高精度,高扭矩,高刚性,高效率,高稳定性,低噪音,低背隙。
产品介绍: 可搭配步进马达或伺服马达使用,降低转速、高转矩化、增加马达转子惯性,提高刚性、缩短启动与停止定位时间,马达功率小型化 ,同时提高惯性负载的稳定性与降低振动。单级可达3弧分内,双级可达5弧分内。